Entwicklung einer Platine zur Bewegung der Spieler
Um ein Männchen zu rotieren bzw. linear nach links und rechts zu bewegen, ist eine komplexes Zusammenspiel zwischen einem Motor, dem Drehgeber und einem Servomotor erforderlich. Das Ganze soll mit einem Microcontroller überwacht und gesteuert werden, der jeweils für eine Stange mit ihren Spielern zuständig ist. Wie bereits im ersten Blogpost gezeigt, wird von einer Seite eine Gewindestange im Inneren der Tischkickerstange rotiert. Dadurch kann sich das Männchen bewegen. Für diese Bewegung ist ein Motor erforderlich, der sowohl schnelle Bewegungen durchführen kann, als auch auf den Millimeter genau gebremst werden kann.
Damit mein Programm später ermitteln kann, wo sich die Männchen befinden, ist direkt mit dem Motor ein inkrementeller Drehgeber, ein sog. Encoder, verbunden. Dieser gibt beim Feststellen einer Drehung je nach Richtung einen Impuls. Somit kann die genaue Position durch Zählen der Impulse bestimmt werden. Mehr zum Aufbau dieser Hardware in einem der nächsten Blogposts.
Um einen Schuss auszuführen, müssen sich die Männchen um die eigenen Achse drehen können. Dafür nutze ich ein High-Speed Servomotor, wie er auch in RC-Rennautos zum Einsatz kommt.
Die Softwareentwicklung setzt einen zuverlässigen Hardwareaufbau voraus. Deswegen haben ich mich für die Konstruktion einer eigenen PCB bzw. Platine entschieden. An diese können übersichtlich alle Aktoren und Sensoren angeschlossen werden. Über einen USB-Anschluss kann der Datenaustausch mit dem Computersystem sichergestellt werden, das später die Spielzüge aus der Auswertung der Kameradaten errechnet. Das Herzstück der Platine ist der Controller "rp2040" der Raspberry Pi Foundation.
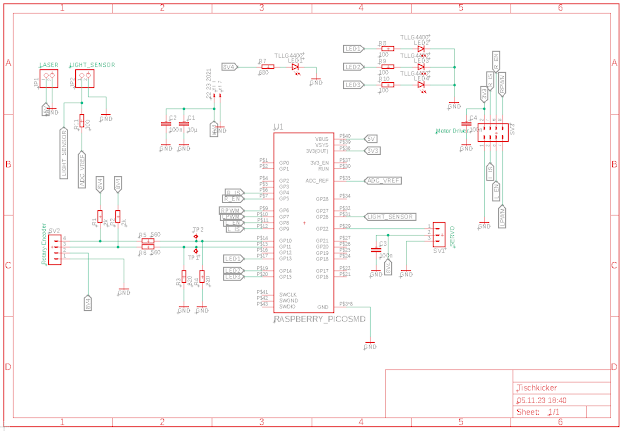 |
Um den Mikrocontroller (rp2040) herum sind auf dem Schaltplan die weiteren Komponenten der PCB platziert |
 |
Das finale Layout der Platine, wobei die roten Komponenten auf der Ober- und die blauen auf der Unterseite zu finden sind |
 |
| Eingebaute Platine mit der links zu sehenden Kabelbrücke für den Pinbelegungsfehler |


Kommentare
Kommentar veröffentlichen