Erster Prototyp der Mechanik
Scroll down for english version!
Das Ziel: Ein autonomer Tischkicker-Roboter! Ein menschlicher Mitspieler soll durch einen Roboter ersetzt werden. Es gilt zunächst die Mechanik und Elektronik zu entwerfen, sodass die Maschine die gleichen Möglichkeiten, wie der Mensch hat. Im folgenden Schritt soll dann das Programm, welches den Roboter steuert, solange optimiert werden, bis der Mensch geschlagen werden kann. Dafür verfolgt eine Kamera das Spielgeschehen und trackt Spieler und Ball in Echtzeit. Mithilfe von künstlicher Intelligenz kann der Spielverlauf der nächsten Sekunden vorhergesagt und entsprechend gehandelt werden.
An allen vier Stangen benötigt der Roboter die Möglichkeit die Männchen nach links und rechts zu bewegen sowie zu drehen, um einen Schuss durchzuführen. Um die Technik möglichst kompakt zu halten, war das die ersten Idee des Prototypen:
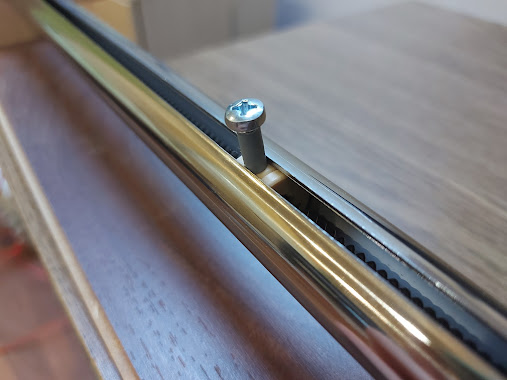
Durch die hohlen Stangen läuft eine Steilgewindespindel. Für jedes Männchen läuft darauf eine Spindelmutter. Um durch die äußere Stange das Männchen mit der Spindelmutter zu verbinden, wurde ein Gewinde in diese geschnitten. Mit einem Schlitz in der äußeren Stange wird dann das Männchen mit einer Schraube an der Spindelmutter befestigt. Folgende Skizze zeigt den Aufbau schematisch:



The goal: An autonomous foosball table robot! A human player was replaced by a robot. The first thing to do was to design the mechanics and electronics so that the machine has the same capabilities as a human. Furthermore, the program that controls the robot should be optimized until the human can be beaten. A high-speed camera actively follows the game and tracks the player and the ball in real time. Leveraging artificial intelligence the next seconds of the game can be predicted and the accordingly.
On all four rods, the robots need the ability to move the players left and right and rotate them in order to fire a shot. In order to keep the technology as compact as possible, this was the first idea of the prototype:


Sieht schon vielversprechend aus.
AntwortenLöschenBin auf das Ergebnis gespannt.
Viel Erfolg.
Sehr beeindruckend. Speziell das Ineinandergreifen von hochpräziser Mechanik, Kameratechnik, Computer H/W und S/W bis hin zum Einsatz von KI. Bin sehr gespannt wie es weiter geht.
AntwortenLöschenSuper, weiter so! Ich glaub an Dein Projekt. Du schaffst das!
AntwortenLöschen