Erste Tests zum KI-Tracking
Damit das System zu jeder Zeit genau weiß, wo die einzelnen Spieler sich befinden und wie der Ball rollt, befindet sich über dem Tischkicker eine Kamera, die mit einer hohen Bildwiederholrate auch schnelle Bälle erkennen kann. Um das System möglichst zuverlässig zu gestalten, sodass es bei verschiedenen Spiel- und Lichtbedingungen zuverlässig funktioniert, soll ein yolov8 Netzwerk eingesetzt werden.
Mithilfe von über 3000 manuell markierten Bildern aus der Vogelperspektive konnten die KI lernen den Ball und die Männchen zuverlässig zu erkennen.

Nach einiger Trainingszeit konnte das neuronale Netzwerk eine Genauigkeit von 98% erreichen. Beeindruckend ist, dass die künstliche Intelligenz sogar in der Lage ist durch Stangen verdeckte Bälle, als auch durch Bewegungsunschärfe verzogene Bälle zu detektieren. Das ist insbesondere dann wichtig, wenn schnelle Bälle von der einen Seite auf die andere geschossen werden und das System entsprechen reagieren muss. Im folgenden Bild lässt sich gut erkennen, welche verdeckten Bälle das System noch erkennen kann.
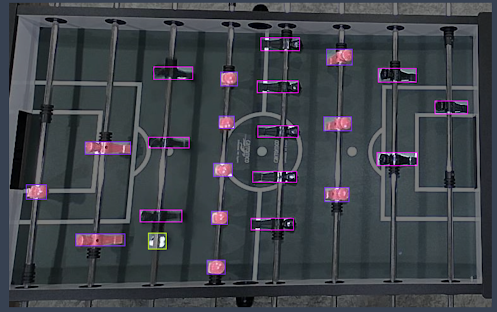
Vollständig richtig markiertes Bild mit verdecktem Ball
Tim Arnold


Kommentare
Kommentar veröffentlichen